
 Türkçe
Türkçe









Kalıcı mıknatıs senkron motoru
Kalıcı bir mıknatıs senkron motoru arasındaki ana fark (PMSM) ve bir indüksiyon motoru rotorda. çalışmalar 1 PMSM bir verimlilik yaklaşık olarak 2% Daha Yüksek Verimli (IE3) İndüksiyon elektrik motoru, statorun aynı tasarıma sahip olması şartıyla ve aynı Değişken Frekans Sürücüsü Kontrol için kullanılır. Bu durumda, diğer elektrik motorlarına kıyasla kalıcı mıknatıs senkron elektrik motorları en iyisine sahiptir performans: Güç / Hacim, Tork / Autertia, vb.
her türlü gibi kalıcı bir mıknatıs senkron motoru Dönen elektrik motoru, bir rotor ve A statordan oluşur. Stator sabittir bölüm. Rotor döner parçası.
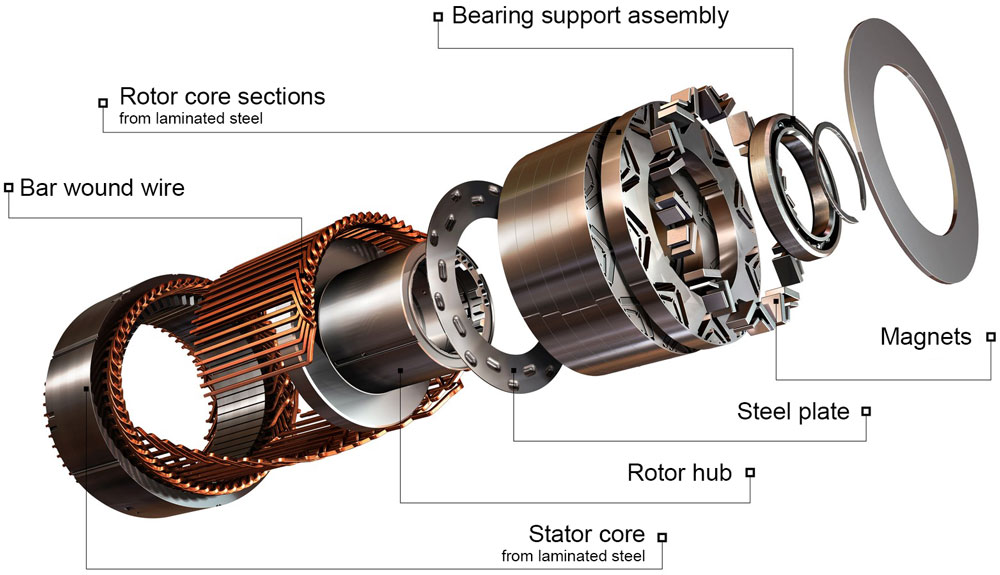
Tipik olarak, rotor elektrik motorunun statorunun içine yerleştirilir, ayrıca harici rotorlu yapılar da vardır. - içten elektrikli motorlar.
rotorKalıcı Magnets'ten oluşur. Zorlu kuvvetli malzemeler kalıcı olarak kullanılır. Magnets.
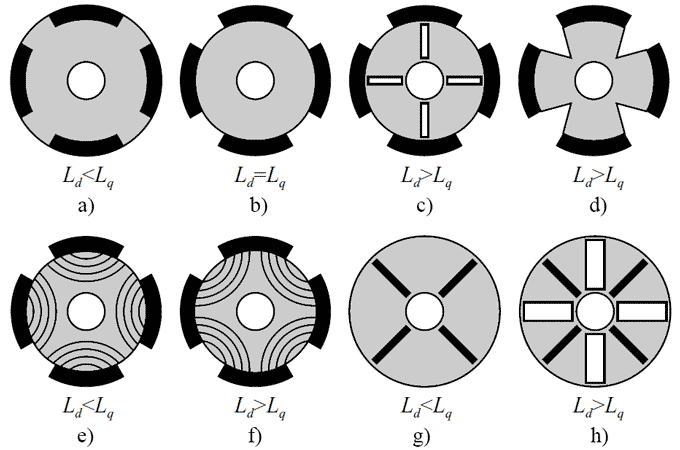
Sert olmayan bir elektrik motoru göze çarpmayan Direk Rotoru eşit doğrudan ve dörtlü endüktansta l d = l q , oysa Göze çarpan kutup rotorlu bir elektrik motoru için dörtlü endüktans doğrudan L'ye eşit değildir. q ≠ l d .
statorbir dış çerçeveden ve bir çekirdeğinden oluşur. Sargı İle en yaygın tasarım iki- ve üç fazlı sarım.
dağıtılmışYuva sayısının içindeki böyle bir sargıyı arayın Kutup ve Aşama Q = 2, 3, ...., k.
konsantre Böyle bir sarma denir, burada yuva sayısı Kutup ve Aşama Q = 1. Bu durumda, yuvalar statorun çevresi etrafında eşit aralıklıdır. Sargı oluşan iki bobin hem seri hem de içeride bağlanabilir. Paralel. Bu tür sargıların ana dezavantajı, EMF eğrisi biçiminde etkilemenin imkansızlığıdır. [2] .
İletkenteki EMF eğrisinin formu, statorun etrafındaki boşluktaki manyetik indüksiyonun dağılım eğrisi ile belirlenir. Çevresi.
Rotorun göze çarpan kutbu altındaki boşluktaki manyetik indüksiyonun bir trapez şeklinde olduğu bilinmektedir. Şekli. İletkente indüklenen EMF aynı Form'a sahiptir. Eğer Sinüsoidal bir EMF oluşturmak için gereklidir, daha sonra kutup ipuçları, indüksiyon dağılım eğrisinin yapacağı böyle bir şekil verilir. Yakın olmak Sinusoidal. Bu rotorun direk uçlarının levhaları tarafından kolaylaştırılır [2] .
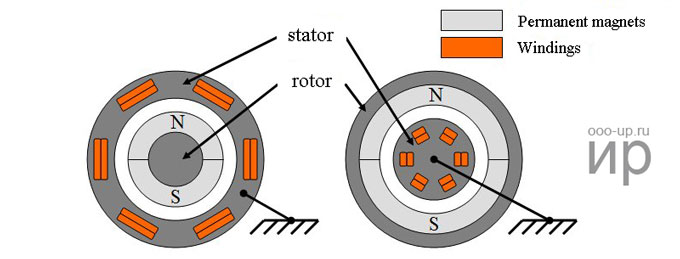
Senkron motorun çalışma prensibistatorun dönen manyetik alanının ve rotorun sabit manyetik alanının etkileşimine dayanır. Dönen manyetik alan kavramı senkron motorun statorunun, bir ile aynıdır. üç fazlı endüksiyon motoru .
Senkron motorun çalışma prensibi, etkileşimine dayanır. dönen manyetik alanstatorun ve rotorun sabit manyetik alanının.
Rotorun manyetik alanı, stator sargılarının senkron alternatif akımıyla etkileşime girer. Ampere's Hukuk, yaratır tork, rotoru döndürmeye zorlamak için ( Daha ).
PMSM rotorunda bulunan kalıcı mıknatıslar Sabit bir manyetik olarak oluşturun alan. Stator alanıyla rotorun senkronize bir dönüş hızında, rotor direkleri, statorun dönen manyetik alanıyla kilitlenir. Bu bağlamda, PMSM olamaz Başlat Kendisi Ne zaman Doğrudan üç fazlı geçerli ağ (Mevcut Güç ızgarası 50Hz).
Kalıcı bir mıknatıs senkron motoru bir kontrol sistemi gerektirir, örneğin bir Değişken Frekans Sürücüsüveya bir servo sürücü. Kontrol uygulaması için çok sayıda kontrol tekniği vardır. Sistemler. Optimal kontrol yönteminin seçimi, esas olarak elektrikli sürücünün önüne konan göreve bağlıdır. Kalıcı bir mıknatıs senkron motorunu kontrol etmek için ana yöntemler Tabloda Aşağıdaki
| kontrol | avantajlar | Dezavantajları | |||
|---|---|---|---|---|---|
| skala | Basit kontrol şeması | Kontrol optimum değil, görevler için uygun değil Değişken yük, kontrol kaybı mümkündür | |||
| Pozisyon sensörü ile | Rotor pozisyonunun ve motor rotasyon hızının pürüzsüz ve hassas ayarı, büyük kontrol aralığı | Rotor pozisyonu sensörü ve güçlü gerektirir Mikrodenetleyici kontrol sisteminin içinde | |||
| Olmadan Pozisyon sensörü | Rotor pozisyonu sensörü yok Gerekli. Rotor pozisyonunun pürüzsüz ve hassas ayarı ve motor rotasyon hızı, büyük kontrol aralığı, ancak daha az pozisyon sensörü ile | Sensorless Alan odaklı kontrolü Tam hız aralığı Sadece PMSM Göze çarpan kutup rotoru ile güçlü bir kontrol sistemi gereklidir | |||
| Doğrudan tork kontrolü | Basit kontrol devresi, iyi dinamik performans, geniş kontrol aralığı, rotor pozisyonu sensörü yok | Yüksek tork ve akım dalgalanması | |||
| açık döngü | Basit kontrol şeması | Kontrol optimum değil, görevler için uygun değil Değişken yük, kontrol kaybı mümkündür | |||
| Konum Sensörü ile (Salon Sensörler) | Basit kontrol şeması | salon sensörleri gerekli. Torque var dalgalanmalar. Kontrolü için tasarlanmıştır PMSM Trapez Back EMF ile, Ne zaman Kontrol PMSM Sinusoidal Back EMF ile ortalama tork,% 5'tir.% 5. | |||
| Olmadan sensör | Daha Güçlü Kontrol Sistemi Gerekli | Düşük hız için uygun değil Operasyon. Torque var dalgalanmalar. Kontrolü için tasarlanmıştır PMSM Trapez Back EMF ile, Ne zaman Kontrol PMSM Sinusoidal Back EMF ile ortalama tork,% 5'tir.% 5. | |||
Gitmek Basit görevleri çözmek genellikle salon sensörleriyle kullanılır. (For örnek, bilgisayar fanlar) Gitmek Elektrikli sürücüden maksimum performans gerektiren problemleri çözün. Alan odaklı Kontrol genellikle seçildi.
Kalıcı bir mıknatıs senkron motorunun en basit şekilde kontrol yöntemlerinden biri - trapez kontrol. trapez kontrolü, PMSM'yi kontrol etmek için kullanılır trapez geri emf. Aynı zamanda, bu yöntem de kontrol etmenizi sağlar PMSM Sinusoidal sırt emp ile, ancak daha sonra elektrikli sürücünün ortalama torku% 5 oranında azalır ve tork dalgaları olacaklar % 14 Maksimum Değer. Geribildirim olmadan ve Rotor tarafından geri bildirimsiz bir yamuk kontrolü vardır. Konum
açık döngü kontrolü ( Geribildirim) optimum değil ve PMSM'nin serbest bırakılmasına yol açabilir senkronizme dışında, yani kontrol edilebilirlik kaybı.
Bir rotor pozisyonu sensörü olarak üç fazlı Yamuk kontrolü, bir elektrik motoruna yerleştirilen üç salon sensörleri yaygın olarak kullanılır, bu da ± 'nin doğruluğu olan açının belirlenmesini sağlar. 30 Derece. Bu kontrolle, stator akımı vektörü, bir elektrik süresi için sadece altı pozisyon alır, bunun bir sonucu olarak çıktısında dalgalanma torku var.

Alan odaklı Kontrol (FOC) Hızı sorunsuz, doğru bir şekilde ve bağımsız olarak kontrol etmenizi sağlar ve torkA Fırçasız Motor. İçin Alan odaklı kontrol algoritmasının çalışması, rotorun konumunu bilmek gereklidir. Fırçasız Motor.

Satıcı 1970'ler Sensorless Vektör kontrol yöntemleri Fırçasız AC motorlarMikroişlemcilerin hızlı gelişimi sayesinde geliştirilmeye başlandı. İlk sensörsüz Açıyı tahmin etme yöntemleri, EMF'yi geri almak için elektrik motorunun özelliklerine dayanıyordu Rotasyon. Motor Back EMF, rotorun konumu hakkında bilgi içerir, bu nedenle, sabit koordinat sisteminde arka EMF'nin değerini hesaplayarak, rotorun konumunu hesaplayabilirsiniz. ama ne zaman Rotor dönmüyor, arka EMF yoktur ve düşük hızda, arka emelin, gürültüden ayrım yapılması zor olan küçük bir genliğe sahiptir, bu nedenle bu yöntem motor rotorunun düşük konumda konumunu belirlemek için uygun değildir. .

Şu anda, Sensörsüz Alan odaklı Kontrol PMSM Tam hız aralığında yalnızca göze çarpan kutuplu motorlar için mümkündür. Rotor.
İçin Ürünlerimiz veya fiyat listemiz hakkında sorular, lütfen bize bırakın ve 24 saat içinde bağlantıda olacağız.





 Çağırmak :
Çağırmak :
Telefon : +8613860661520
 Bize e-posta gönder :
Bize e-posta gönder :
E-posta : ivy@tech-zy.com
 Adres :
Adres :
Floor 16 Building#3, No.136. Kuiqi Road, Mawei District, Fuzhou City, Fujian Province, China
© Telif hakkı: 2026 Fujian ZY Electric & Machinery Technology Co.,Ltd Tüm hakları Saklıdır.

IPv6 Ağ desteği






